
我使用模板?adv_vendor_self_provision_with_peripheral 创建了工程,用来实现相关功能。目前LED灯灯设备正常,但是想要开发一个用电池供电的按钮可以实现灯具控制时,在令CH582M睡眠这里出现了问题。
我的想法是使用 vendor_message_srv_send_trans 把数据发出后等待若干时间,待数据妥善发出后再令CH582M进入睡眠状态,目前使用过Timer0定时、SysTick定时、RTC定时、32KCycle定时执行此过程,但是只要写上睡眠的代码,实际执行时不会等待,而是立即进入了睡眠,导致TMOS无法送达数据。下面是app_main.c的代码,app.c和peripheral.c中只是在接收部分执行了相应逻辑。
millis的宏定义为 #define millis() __millis
__millis为一个uint32_t全局变量
论坛的楼层更新功能有BUG,会导致空白字符显示成 ? 可能是字符集问题,代码已在下面的楼层中重新发出
因为是测试代码,所以按键使用了主循环轮询检测,没有使用中断
热门产品 :
CH32V317: 互联型青稞RISC-V MCU
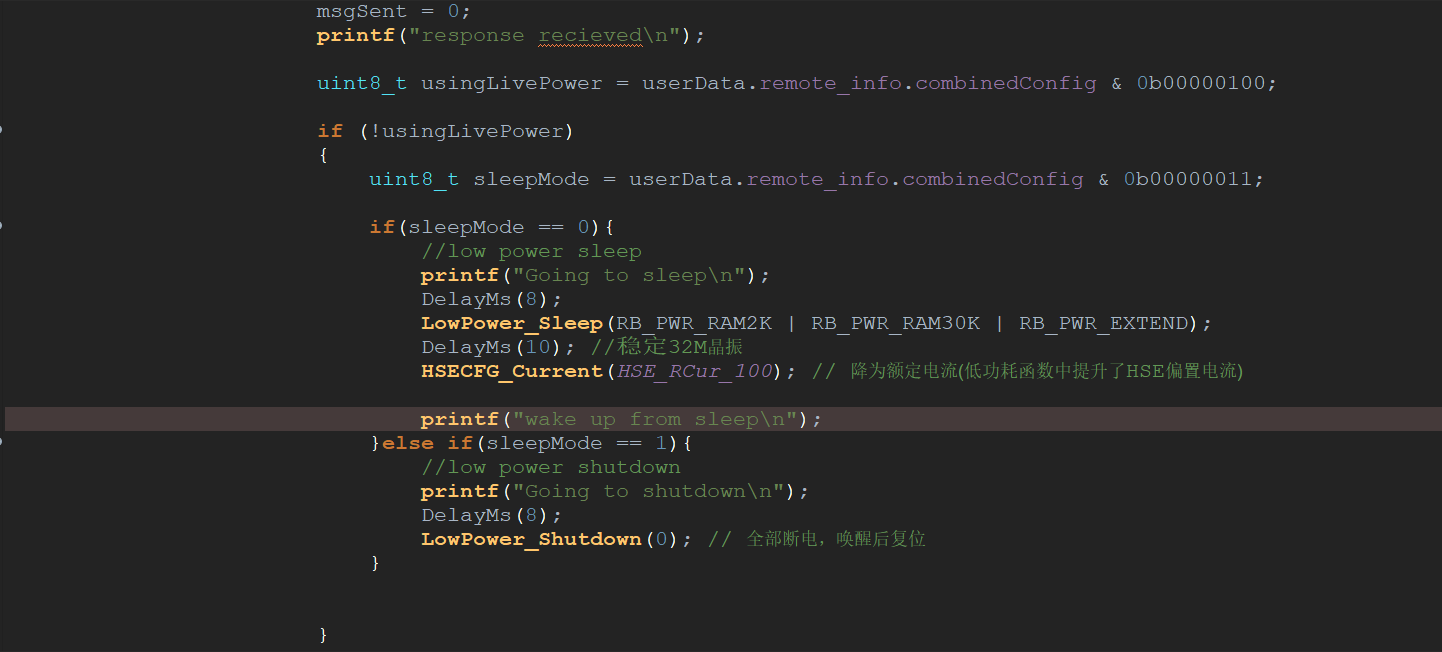 实际使用时发现GPIO中断唤醒后,打印了wake up from sleep,主循环也进入了一次,显示是发送了数据(实际没有发送成功,可能是因为刚唤醒还未加入mesh网络),之后GPIO中断可以正常执行,但是主循环似乎退出了,我尝试在这行printf后手动运行主循环,但是消息也无法成功发送,似乎未能加入mesh网络,尝试了在唤醒后运行main函数中的所有初始化代码均无法使用,而且会报错-7 unable to send message,似乎是协议栈底层未能正确发送数据,导致上层消息队列已满,请问这个该如何解决呢?非常感谢
实际使用时发现GPIO中断唤醒后,打印了wake up from sleep,主循环也进入了一次,显示是发送了数据(实际没有发送成功,可能是因为刚唤醒还未加入mesh网络),之后GPIO中断可以正常执行,但是主循环似乎退出了,我尝试在这行printf后手动运行主循环,但是消息也无法成功发送,似乎未能加入mesh网络,尝试了在唤醒后运行main函数中的所有初始化代码均无法使用,而且会报错-7 unable to send message,似乎是协议栈底层未能正确发送数据,导致上层消息队列已满,请问这个该如何解决呢?非常感谢