采用的是LLE_MODE_BASIC模式,
之前每发送一次之后调用一次接收,不会死机。
后来因为有10个CH582同时工作,跑的程序一样,导致需要发送一次多次调用接收,就写了个状态机。
状态机是绝对没问题的,
而且保证每次TX或者RX的回调函数完成后才能出发下次的收或者发。
目前的情况是11个板子同时工作,大概三到五分钟左右会有板子陆续死机,大概会有两到三个板子死机,而且板子不固定的死机,死机之后CH582的I2C等模块都不工作了。
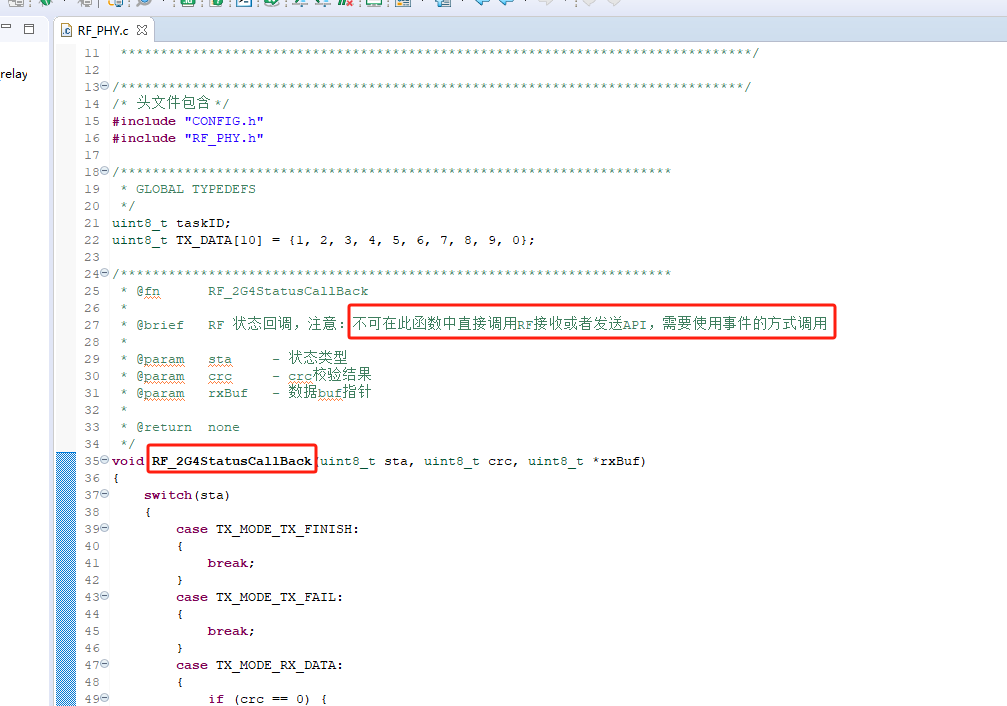
调用收函数
RF_Shut();
RF_Rx(RX_DATA, 192, 0xFF, 0xFF);
调用的发函数
RF_Shut();
RF_Tx(TX_DATA, pMsg[0], 0xFF, 0xFF);
能不能给指引个方向,实在是没有思绪去调试这个问题了
热门产品 :
CH390:以太网控制器芯片