实例代码如下
/********************************** (C) COPYRIGHT *******************************
* File Name : main.c
* Author : WCH
* Version : V1.0.0
* Date : 2024/02/20
* Description : Main program body.
*********************************************************************************
* Copyright (c) 2021 Nanjing Qinheng Microelectronics Co., Ltd.
* Attention: This software (modified or not) and binary are used for
* microcontroller manufactured by Nanjing Qinheng Microelectronics.
*******************************************************************************/
/*
*@Note
*TIM trigger ADC conversion routine:
*ADC channel 2 (PC4) - injection group channel, TIM1 CH3 pin (PC3) TIM trigger,
*In this mode, an ADC conversion is triggered by an event on TIM1 CH3 TIM trigger, and a JEOC interrupt is generated after
*the conversion is completed.
*
*/
#include "debug.h"
/* Global Variable */
/*********************************************************************
* @fn ADC_Function_Init
*
* @brief Initializes ADC collection.
*
* @return none
*/
void ADC_Function_Init(void)
{
ADC_InitTypeDef ADC_InitStructure = {0};
GPIO_InitTypeDef GPIO_InitStructure = {0};
NVIC_InitTypeDef NVIC_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOC, &GPIO_InitStructure);
ADC_DeInit(ADC1);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigInjecConv_T1_CC3;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_InjectedSequencerLengthConfig(ADC1, 1);
ADC_InjectedChannelConfig(ADC1, ADC_Channel_2, 1, ADC_SampleTime_9Cycles);
ADC_ExternalTrigInjectedConvCmd(ADC1, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = ADC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
ADC_ExternalTrig_DLY(ADC1, ADC_ExternalTrigInjec_DLY, 0x80); /* external trigger sources delay time */
ADC_Calibration_Vol(ADC1, ADC_CALVOL_50PERCENT);
ADC_ITConfig(ADC1, ADC_IT_JEOC, ENABLE);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
/*********************************************************************
* @fn EXTI_Event_Init
*
* @brief Initializes EXTI.
*
* @return none
*/
void TIM1_PWM_In(u16 arr, u16 psc, u16 ccp)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
TIM_OCInitTypeDef TIM_OCInitStructure = {0};
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_TIM1, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = ccp;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM1, &TIM_OCInitStructure);
TIM_CCxCmd(TIM1, TIM_Channel_3, TIM_CCx_Enable);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Disable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_SelectOutputTrigger(TIM1, TIM_TRGOSource_Update);
TIM_Cmd(TIM1, ENABLE);
}
/*********************************************************************
* @fn main
*
* @brief Main program.
*
* @return none
*/
int main(void)
{
SystemCoreClockUpdate();
Delay_Init();
#if (SDI_PRINT == SDI_PR_OPEN)
SDI_Printf_Enable();
#else
USART_Printf_Init(115200);
#endif
printf("SystemClk:%d\r\n", SystemCoreClock);
printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure = {0};
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
ADC_Function_Init();
TIM1_PWM_In(4800,100,2400);
while(1)
{
}
}
void ADC1_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
/*********************************************************************
* @fn ADC1_IRQHandler
*
* @brief ADC1_2 Interrupt Service Function.
*
* @return none
*/
void ADC1_IRQHandler(void)
{
if(ADC_GetITStatus(ADC1, ADC_IT_JEOC))
{
//printf("ADC Extline trigger conversion...\r\n");
//ADC_val = ADC_GetInjectedConversionValue(ADC1, ADC_InjectedChannel_1);
//printf("JADC-%04d\r\n", ADC_val);
GPIO_SetBits(GPIOD, GPIO_Pin_2);
GPIO_ResetBits(GPIOD, GPIO_Pin_2);
}
ADC_ClearITPendingBit(ADC1, ADC_IT_JEOC);
}
当延时设置为0x00时:
ADC_ExternalTrig_DLY(ADC1, ADC_ExternalTrigInjec_DLY, 0x00);
波形如下:

当延时设置为0x40时:
ADC_ExternalTrig_DLY(ADC1, ADC_ExternalTrigInjec_DLY, 0x40);
波形如下:
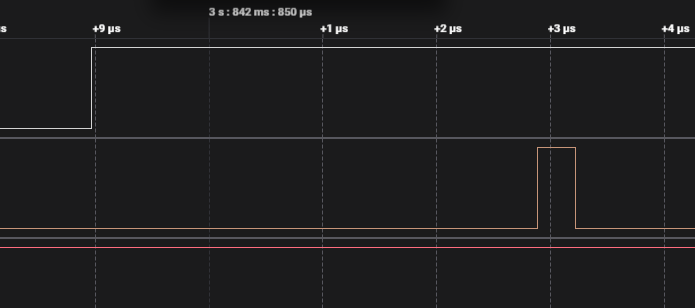
大约都是3.8us,与预期不符。
代码附件:
热门产品 :
CH390:以太网控制器芯片