
在安卓/Linux主机上经常会遇到CPU原生SPI/I2C/GPIO Master资源通道不够、功能或性能不满足实际产品需求的情况,基于USB2.0高速USB转接芯片CH347,配合厂商提供的USB转MPHSI(Multi Protocol High-Speed Serial Interface)Master总线驱动(CH34X-MPHSI-Master)可轻松实现为系统扩展SPI和I2C总线、GPIO Expander、中断信号等。
该驱动软件正常工作后,会在系统下创建新的SPI和I2C Master,拥有独立的bus num,原SPI和I2C器件的设备驱动可直接挂载到该总线上,无需任何修改。驱动会同时创建GPIO相关资源,各GPIO可通过sysfs文件系统或应用层软件直接访问,也可以由其他设备驱动申请该GPIO的访问权以及申请GPIO对应中断号并注册中断服务程序。
项目地址:
应用框图
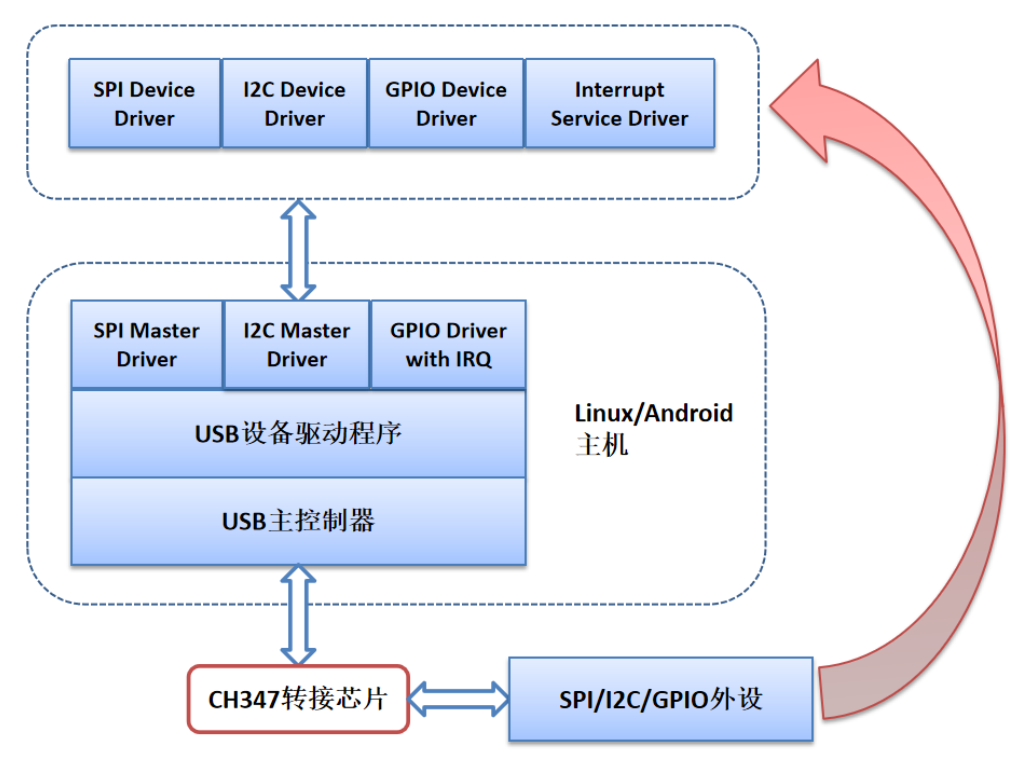
CH347是一款高速USB总线转接芯片,通过USB总线提供异步串口、I2C同步串行接口、SPI同步串行接口和JTAG接口等。本方案仅使用到CH347的高速SPI、I2C串行总线,以及GPIO功能,使用串口功能需要单独使用CH343SER串口驱动,使用JTAG功能或SPI和I2C的非总线模式应用可使用CH341PAR多功能USB设备驱动。
CH34X-MSPI-Master总线驱动特点:
1、支持CH347与CH341总线转接芯片;
2、支持SPI、I2C、GPIO、IRQ等接口和功能扩展;
3、支持SPI、I2C的bus总线号、GPIO编号、IRQ中断号的动态分配以及静态指定;
4、支持自动绑定spi通用设备驱动,创建/dev/spidev*;
驱动概述
该Master驱动支持在Linux/安卓主机上,使用USB转串口/JTAG/SPI/I2C/GPIO转换芯片CH347,和USB转串口/SPI/I2C/GPIO转换芯片CH341。
驱动仅支持SPI/I2C/GPIO接口,该文档主要介绍CH347芯片的相关特性。
CH347F SPI接口
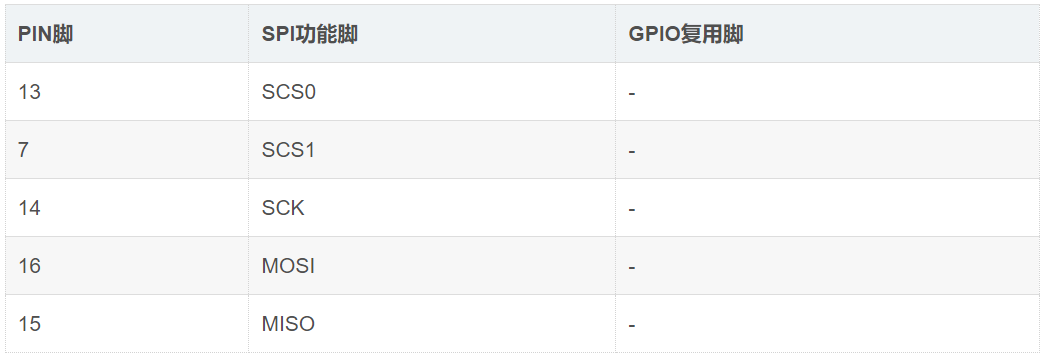
CH347T SPI接口
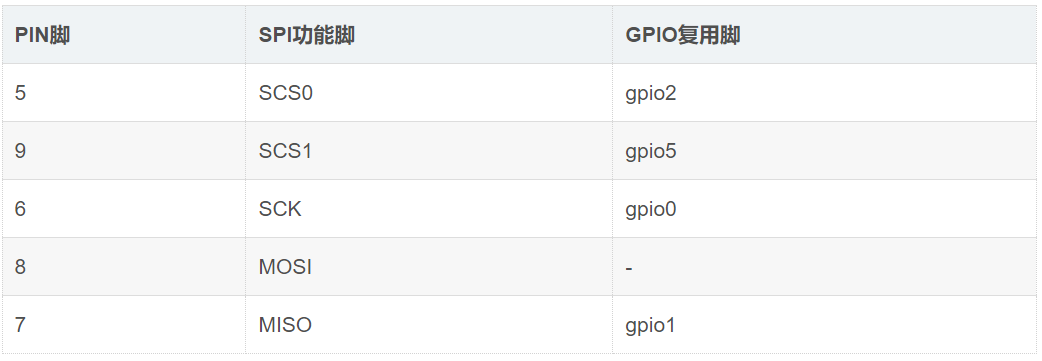
SPI接口特性:
1、SPI模式0/1/2/3
2、SPI时钟频率60MHz~218.75KHz
3、MSB/LSB传输
4、8位/16位传输
5、2路片选
6、片选高/低有效
CH347F I2C接口

CH347T I2C接口

CH347F/T支持至少4种I2C时钟:20kHz,100kHz,400kHz和750kHz。驱动配置的默认I2C时钟为100KHz,当前不支持动态修改该时钟频率,若需要修改可以在ch34x_mphsi_i2c_init函数中修改。
在Linux上增加对器件的驱动支持十分方便,只需要将该器件的设备驱动绑定到此Master驱动生成的总线下即可。举例:
modprobe bmi160_i2c
echo "bmi160 0x68" > /sys/bus/i2c/devices/i2c-$DEV/new_device
或
modprobe tcs3472
echo "tcs3472 0x29" > /sys/bus/i2c/devices/i2c-$DEV/new_device
驱动创建的I2C设备文件在/sys/bus/i2c/devices/i2c-$DEV/ 目录下
CH347F GPIO接口

CH347T GPIO接口

CH347的硬件接口支持GPIO0~GPIO7,考虑到部分引脚被SPI和I2C的接口占用了,此驱动仅开放支持了GPIO4,GPIO6和GPIO7。
驱动操作说明
1、使用“make”或者其他方式编译此驱动,如果动态编译成功会生成“ch34x_mphsi_master.ko”驱动模块
2、使用“sudo make load”或“sudo insmod ch34x_mphsi_master.ko”动态加载驱动,使用此方式加载SPI总线号和GPIO起始序号会自动分配,也可以通过增加参数进行指定。
3、如:“sudo insmod ch34x_mphsi_master.ko spi_bus_num=3 gpio_base_num=60”
4、使用“sudo make unload”或“sudo rmmod ch34x_mphsi_master.ko”卸载驱动
5、使用“sudo make install”将驱动开机自动工作
6、使用“sudo make uninstall”卸载该驱动
使用此驱动,需要确认CH347/CH341已经插入主机并且工作正常,可以使用“lsusb”或“dmesg”指令来确定,CH347/CH341的厂商VID是0x1A86。
如果芯片工作正常,可以使用“ls /sys/class/master”,“ls /sys/class/gpio”指令确认设备节点路径。
用户空间访问
使用SPI接口
一旦驱动加载成功,默认会提供2个关联到这个新的SPI Bus的SPI Slave设备,以CH347为例:
/dev/spidev0.0 /dev/spidev0.1
根据设备名称规则 /dev/spidev<bus>.<cs>,<bus> 是驱动自动选择的总线号,<cs> 是芯片指定引脚的片选信号。
自linux内核5.15开始绑定到spidev驱动需要主动bind使/dev目录下设备可用,如bus 0下slave 1:
# echo spidev > /sys/class/spi_master/spi0/spi0.1/driver_override
# echo spi0.1 > /sys/bus/spi/drivers/spidev/bind
对所有ch34x_mphsi_master驱动管理的设备:
# for i in /sys/bus/usb/drivers/mphsi-ch34x/*/spi_master/spi*/spi*.*; do echo spidev > $i/driver_override; echo $(basename $i) > /sys/bus/spi/drivers/spidev/bind; done
标准I/O函数如 open, ioctl 和close 可以直接和该spi slave进行通讯,打开SPI设备:
int spi = open("/dev/spidev0.0", O_RDWR));
设备打开成功后,可以使用 ioctl函数修改SPI配置和传输数据等。
uint8_t mode = SPI_MODE_0;
uint8_t lsb = SPI_LSB_FIRST;
...
ioctl(spi, SPI_IOC_WR_MODE, &mode);
ioctl(spi, SPI_IOC_WR_LSB_FIRST, &lsb);
函数 ioctl传输数据示例:
uint8_t *mosi; // output data
uint8_t *miso; // input data
...
// fill mosi with output data
...
struct spi_ioc_transfer spi_trans;
memset(&spi_trans, 0, sizeof(spi_trans));
spi_trans.tx_buf = (unsigned long) mosi;
spi_trans.rx_buf = (unsigned long) miso;
spi_trans.len = len;
int status = ioctl (spi, SPI_IOC_MESSAGE(1), &spi_trans);
// use input data in miso
挂载SPI NOR FLASH作为MTD存储设备
举例:flash器件挂载到bus 0 chip 0(spi0.0)
# echo spi0.0 > /sys/bus/spi/drivers/spidev/unbind
# echo spi-nor > /sys/bus/spi/devices/spi0.0/driver_override
# echo spi0.0 > /sys/bus/spi/drivers/spi-nor/bind
注:为方便用户使用,该驱动默认会创建spidev设备,用户可以使用上面的命令主动解绑与spidev的绑定,或者undefine在ch34x_mphsi_master_spi.c文件中的“SPIDEV”宏定义。
使用GPIO接口
用户空间访问GPIO,可以使用sysfs,对驱动支持的GPIO,可在如下系统目录下查看。
/sys/class/gpio/<gpio>/
is created by the system, where <gpio> is the name of the GPIO as defined in the driver variable ch347_board_config. These directories contain
<gpio> 是定义在驱动变量 ch347_board_config中的GPIO名称 ,目录包含
1、value 文件用于配置或读取GPIO电平
2、edge 文件用于配置GPIO中断使能以及中断类型
3、direction 文件用于改变支持双向GPIO的引脚方向
注:对文件的读写操作,用户需要指定的读写权限。
当前支持的中断类型包括:
1、rising 上升沿中断
2、falling 下降沿中断
3、both 双边沿中断
打开GPIO
使用GPIO前,需要先打开value文件
int fd;
if ((fd = open("/sys/class/gpio/<gpio>/value", O_RDWR)) == -1)
{
perror("open");
return -1;
}
<gpio> 是GPIO的名称
设置GPIO方向
配置GPIO方向为input或output,可在root权限下简单地写入in或out字符串到direction文件。
echo out > /sys/class/gpio/gpio4/direction
设置GPIO输出
文件value打开后,可使用标准I/O函数进行读写,配置GPIO输出电平,可简单使用write函数,写入后GPIO会立刻输出指定电平。
if (write(fd, value ? "1" : "0", 1) == -1)
{
perror ("write");
return -1;
}
读取GPIO电平
读取GPIO电平,可简单使用read函数:
char buf;
if (read(fd, &buf, 1) == -1)
{
perror("read");
return -1;
}
value = (buf == '0') ? 0 : 1;
每一次读操作后,需要将文件位置指针需要重新定位到首字节。
if (lseek(fd, 0, SEEK_SET) == -1) {
perror("lseek");
return -1;
}
使用GPIO中断
完整的使用GPIO中断功能的驱动例程:
#include <linux/bitops.h>
#include <linux/clk.h>
#include <linux/delay.h>
#include <linux/device.h>
#include <linux/gpio.h>
#include <linux/of_gpio.h>
#include <linux/module.h>
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/uaccess.h>
#include <linux/irq.h>
#include <linux/timer.h>
#include <linux/interrupt.h>
#define GPIO_NUMBER 509 /* modify with actual gpio number */
static irqreturn_t gpio_interrupt(int irq, void *dev_id)
{
printk("gpio_interrupt callback.\n");
return IRQ_HANDLED;
}
static int __init ch34x_gpio_init(void)
{
unsigned long flags = IRQF_TRIGGER_FALLING;
int ret;
int irq;
irq = gpio_to_irq(GPIO_NUMBER);
printk("irq: %d\n", irq);
ret = gpio_request(GPIO_NUMBER, "gpioint");
if (ret) {
printk("gpio_request failed.\n");
goto exit;
}
ret = gpio_direction_input(GPIO_NUMBER);
if (ret) {
printk("gpio_direction_input failed.\n");
gpio_free(GPIO_NUMBER);
goto exit;
}
irq_set_irq_type(irq, flags);
ret = request_irq(irq, gpio_interrupt, 0, "gpio_handler", NULL);
printk("%s - request_irq = %d result = %d\n", __func__, irq, ret);
exit:
return ret;
}
static void __exit ch34x_gpio_exit(void)
{
int irq;
irq = gpio_to_irq(GPIO_NUMBER);
free_irq(irq, NULL);
gpio_free(GPIO_NUMBER);
printk("gpio driver exit.\n");
}
module_init(ch34x_gpio_init);
module_exit(ch34x_gpio_exit);
MODULE_LICENSE("GPL");
注:该驱动默认会创建gpio设备,若需要在内核中使用中断功能,需要undefine在ch34x_mphsi_master_gpio.c中定义的“SYSFS_GPIO”宏。
CH341支持3种工作模式
模式0: [串口]
模式1: [SPI+ I2C + GPIO]
模式2: [打印口]
CH347F支持1种模式(优选&主推型号)
模式0: [串口* 2 + SPI + I2C + JTAG + SWD] VCP/CDC/HID 驱动模式
CH347T 支持4种模式
模式0: [串口* 2] VCP/CDC 驱动模式
模式1: [SPI + I2C + 串口* 1] VCP 驱动模式
模式2: [SPI + I2C + 串口* 1] HID 驱动模式
模式3: [JTAG + 串口* 1] VCP 驱动模式
该驱动支持CH347F、CH341的模式1、CH347的模式1
有技术问题,可以发邮件至技术邮箱: tech@wch.cn