使用TIM10,能够进入比较中断,进不了更新中断
void TIM10_CC_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
void TIM10_UP_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
uint32_t RPM = 0;
uint8_t TimeOutNum=0;
void RPM_Sensor_Init( u16 arr, u16 psc )
{
GPIO_InitTypeDef GPIO_InitStructure={0};
TIM_ICInitTypeDef TIM_ICInitStructure={0};
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0};
NVIC_InitTypeDef NVIC_InitStructure={0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB | RCC_APB2Periph_TIM10, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( GPIOB, &GPIO_InitStructure);
GPIO_ResetBits( GPIOB, GPIO_Pin_8 );
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00;
TIM_TimeBaseInit( TIM10, &TIM_TimeBaseInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x00;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_PWMIConfig( TIM10, &TIM_ICInitStructure );
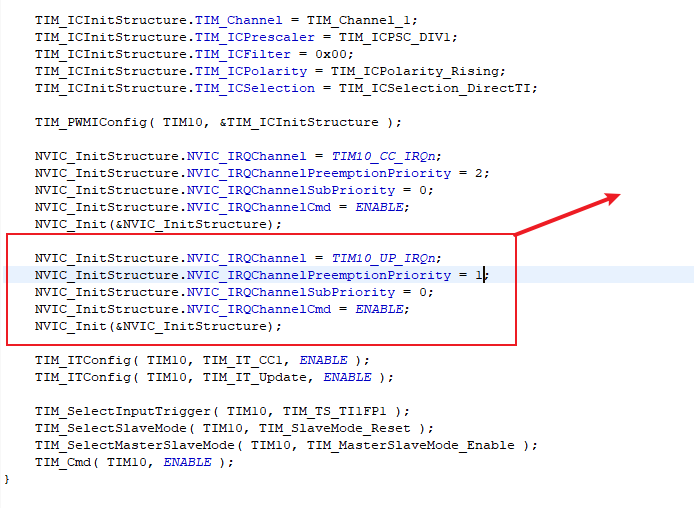
NVIC_InitStructure.NVIC_IRQChannel = TIM10_CC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig( TIM10, TIM_IT_CC1, ENABLE );
TIM_ITConfig( TIM10, TIM_IT_Update, ENABLE );
TIM_SelectInputTrigger( TIM10, TIM_TS_TI1FP1 );
TIM_SelectSlaveMode( TIM10, TIM_SlaveMode_Reset );
TIM_SelectMasterSlaveMode( TIM10, TIM_MasterSlaveMode_Enable );
TIM_Cmd( TIM10, ENABLE );
}
void TIM10_CC_IRQHandler(void)
{
if( TIM_GetITStatus( TIM10, TIM_IT_CC1 ) != RESET )
{
RPM = (uint32_t)(1000000/TIM_GetCapture1( TIM10 )*60);
TimeOutNum = 0;
TIM_ClearITPendingBit( TIM10, TIM_IT_CC1);
}
}
void TIM10_UP_IRQHandler(void)
{
if (TIM_GetITStatus(TIM10, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM10, TIM_IT_Update);
TimeOutNum++;
if (TimeOutNum>5) RPM=0;
}
}
热门产品 :
CH397: 高集成度、低功耗USB网卡芯片