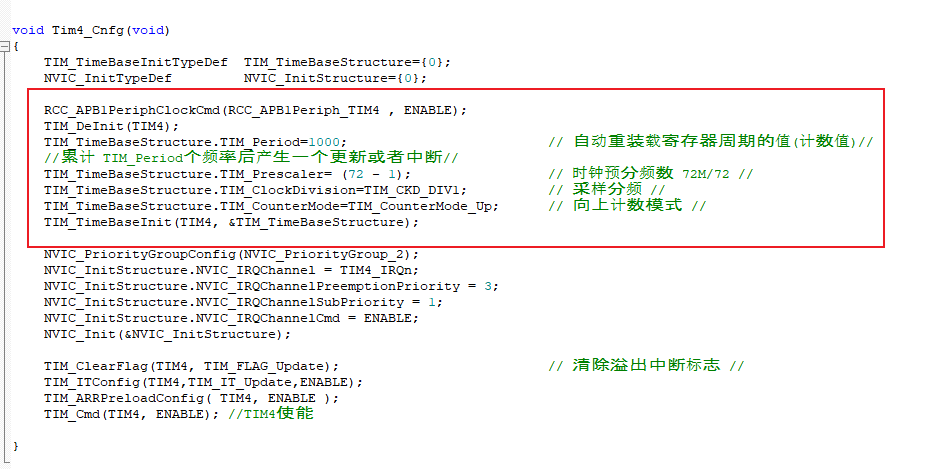
/* 配置TIM4 */
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0};
TIM_TimeBaseInitStructure.TIM_Period = 1000;
TIM_TimeBaseInitStructure.TIM_Prescaler = 1000;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_DeInit(TIM4);
RCC_APB1PeriphResetCmd(RCC_APB1Periph_TIM4, ENABLE);
/* 初始化TIM4 */
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStructure);
TIM_ClearFlag( TIM4, TIM_FLAG_Update );
TIM_ARRPreloadConfig( TIM4, ENABLE );
TIM_Cmd( TIM4, ENABLE );
USART_Printf_Init(9600);
while(1){
printf("Timer4 CNT:0x%06\r\n",TIM_GetCounter(TIM4));
Delay_Ms(200);
}
打印结果:
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000
Timer4 CNT:0x00000